

These drawings were inspired by the theory of “Deterministic Chaos“.
THE THEORY: Deterministic chaos, often just called “chaos”, refers in the world of dynamics to the generation of random, unpredictable behavior from a simple, but nonlinear rule. The rule has no “noise”, randomness, or probabilities built in. Instead, through the rule’s repeated application the long-term behavior becomes quite complicated. In this sense, the unpredictability “emerges” over time.
There are a number of characteristics one observes in a deterministically chaotic system:
Long term behavior is difficult or impossible to predict: Even very accurate measurements of the current state of a chaotic system become useless indicators of where the system will be. One has to measure the system again to find out where it is. Sensitive dependence on initial conditions (a property noted by Poincare, Birkhoff, and even Turing): Starting from very close initial conditions a chaotic system very rapidly moves to different states. Broadband frequency spectrun: That is, the output from a chaotic system sounds “noisy” to the ear. Many frequencies are excited. Exponential amplification of errors: In any real world setting small amounts of external noise rapidly grow to control the sytem. If this noise is below measurement accuracy, so that an experimenter can’t see or control the noise, then the system appears unpredictable. The microscopic “heat bath” is amplified to human scales. Local instability versus global stability: In order to have amplification of small errors and noise, the behavior must be locally unstable: over short times nearby states move away from each other. But for the system to consistently produce stable behavior, over long times the set of behaviors must fall back into itself. The tension of these two properties leads to very elegantly structured chaotic attractors. LINK , WIKI
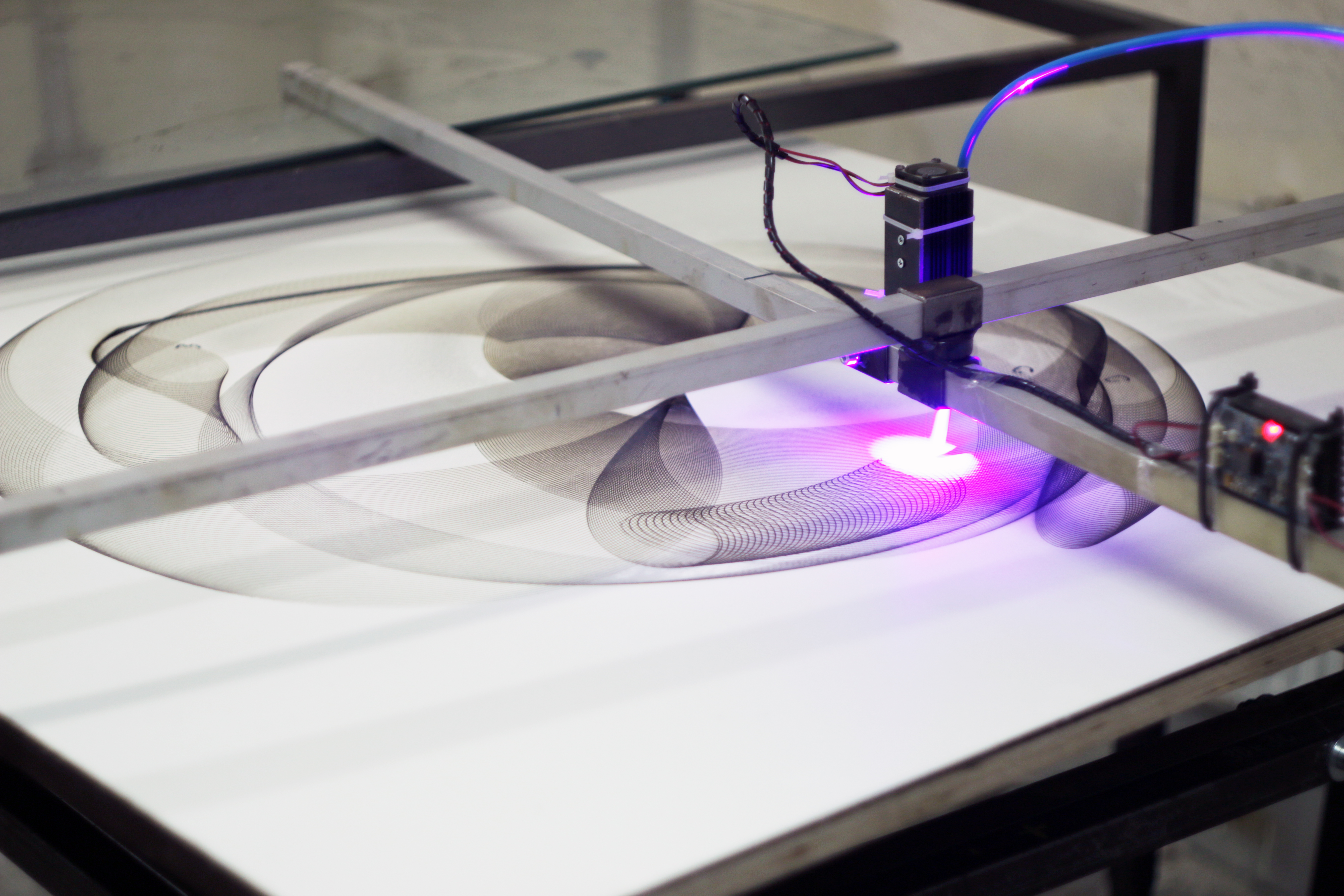
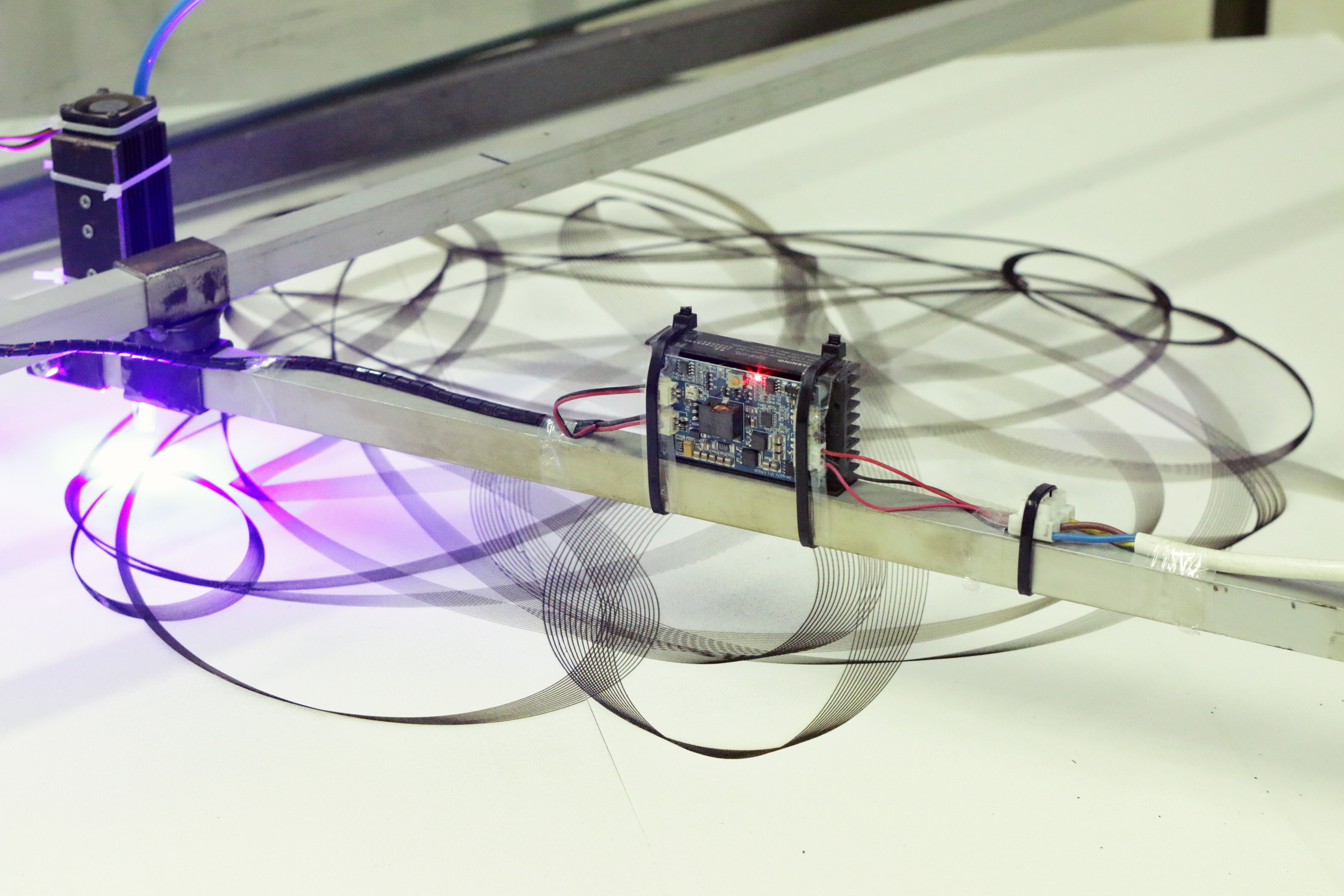
THE DRAWING MACHINE: The figures on the drawings are made by machine I constructed my slef, it uses three separate rotational movements driven by a stepper motors with worm gearbox. Two slowly spinning arms are attached with aditional 2 meter long aluminium profiles, this bonded motion makes simple 2D figures, but with the addition of the 3rd motion of turntable, it makes much more complex looking figures. Motion eg. speed and sense of rotation of each individual motor is progarammed separately and changing in time. Information about it is sent from the PC through arduino and motor-driver in to the motors. Another variables that you can change are the length of the primary arms attached to the motors, by this setting you can change the actual size of the drawing and proportion between two arms movement. Last hardware variable is the beginning angle position between the two attached arms. Just by changing this one variable you alwas get the different outcome, even if you used the same software (pre-programed figure) and other settings stayed the same.




